Facebook
Facebook Google
Google GitHub
GitHub Linkedin
Linkedin
Pinouts are important - if I were an electronics expert I would probably not forget them in the few seconds between looking them up and soldering them!!The transistor pin-out is important. How/where is the LED connected?
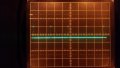
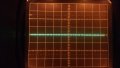
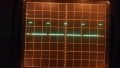
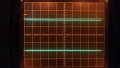
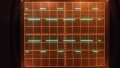
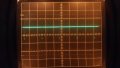
A pic of your actual build may help, also the motor spec. 'Scope shots (scope DC coupled) of the waveforms at both ESC output terminals, with the motor connected, would be useful.
What ESC are you driving the circuit with? Do the power supply, ESC and built circuit have their grounds commoned?
Edit: Re the RFI, I'm no expert but perhaps the split field winding and coil shape/positioning allowed partial cancellation of parasitic external magnetic fields.
1 - the led is soldered to a dropping resistor, and placed across where the relay coils would go. between +tve and the collector of the transistor, which in this case is a D467C.
2 - pics of builds included. I am using a 37ohm and a 10ohm to make up the 47ohm. The back shows signs of multiple resoldering!
3 - the ESC is a common cheapo Chinese one - often called a bluefin after its heatsink colour. I can't remember the specs, but it's reversible. You can have a picture if you like. I would expect to trial the circuits with multiple ESCs before putting them out on a website. Power is from 7.4v Lipo and negative is connected to ESC, base of circuit and frame of scope. Motor frame is not earthed.
4 - . Pics included of probe at one motor terminal. This is positive-going when the motor goes forward, and the circuit should not turn on under that situation. Pic 1 shows the motor at full on, Pic 2 half, pic 3 just on. At pic 1 the Led is not lit but flickering, at Pics 2 and 3 it is on.
Attachments
-
 126.3 KB Views: 4
126.3 KB Views: 4 -
 122.5 KB Views: 4
122.5 KB Views: 4 -
 125.8 KB Views: 4
125.8 KB Views: 4