Facebook
Facebook Google
Google GitHub
GitHub Linkedin
Linkedin
I have an ongoing interest in reversing the vintage Taycol series of field-wound model boat motors using a standard radio control electronic speed controller (ESC). An ESC takes the radio control signal and outputs a PWM current to the (brushed) DC motor. We are running with a 7.2v battery.
The problem is that the ESC simply reverses polarity to reverse a (brushed) motor, while if you reverse the polarity on a field-wound motor the motor continues in the same direction. See this older thread for my earlier attempts. - https://forum.allaboutcircuits.com/threads/problems-reversing-a-field-wound-motor.76145/
You can arrange for such a motor to be reversed using diodes to force one set of coils to stay the same polarity - see here: http://taycol.tk/Rectifier.html
But this loses a few volts from the top speed. A better design would involve detecting the polarity on the input wires, and using this information to switch a relay when reverse was called for - which matches the original design requirement from the 1950s - see here http://taycol.tk/tayins501a.jpg
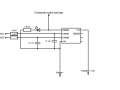
So I set up an LM358, as suggested by crutschow 6 years ago. The circuit is simple - direct connection of the LM358 comparator lines to the power input via a couple of 15k resistors to suppress current flow. But, just driving a signal diode output, I am getting some strange results.
1 - the LM358 works pretty well when forward power is applied, and it is required to output no signal. But, if I alter the speed rapidly, I get slight flickering on the signal diode. I attribute this to back EMF from the spinning motor.
2 - when reverse power is applied, I initially get a strong light from the signal diode. That would be at around half the PWM cycle - an equivalent multimeter voltage of some 3v. By the time the duty cycle reaches 90% the diode is weak and flickering a lot - and it goes out completely at 100%. Possibly this is a back EMF effect as well?
It would obviously be damaging and dangerous to put a control system in a model boat when reverse might suddenly switch to forward - or vice versa! I suspect that there is some way to address this problem - but I'm not an electronics specialist and hope that someone out there might know how it's done?
The problem is that the ESC simply reverses polarity to reverse a (brushed) motor, while if you reverse the polarity on a field-wound motor the motor continues in the same direction. See this older thread for my earlier attempts. - https://forum.allaboutcircuits.com/threads/problems-reversing-a-field-wound-motor.76145/
You can arrange for such a motor to be reversed using diodes to force one set of coils to stay the same polarity - see here: http://taycol.tk/Rectifier.html
But this loses a few volts from the top speed. A better design would involve detecting the polarity on the input wires, and using this information to switch a relay when reverse was called for - which matches the original design requirement from the 1950s - see here http://taycol.tk/tayins501a.jpg
So I set up an LM358, as suggested by crutschow 6 years ago. The circuit is simple - direct connection of the LM358 comparator lines to the power input via a couple of 15k resistors to suppress current flow. But, just driving a signal diode output, I am getting some strange results.
1 - the LM358 works pretty well when forward power is applied, and it is required to output no signal. But, if I alter the speed rapidly, I get slight flickering on the signal diode. I attribute this to back EMF from the spinning motor.
2 - when reverse power is applied, I initially get a strong light from the signal diode. That would be at around half the PWM cycle - an equivalent multimeter voltage of some 3v. By the time the duty cycle reaches 90% the diode is weak and flickering a lot - and it goes out completely at 100%. Possibly this is a back EMF effect as well?
It would obviously be damaging and dangerous to put a control system in a model boat when reverse might suddenly switch to forward - or vice versa! I suspect that there is some way to address this problem - but I'm not an electronics specialist and hope that someone out there might know how it's done?
Last edited: