 Facebook
Facebook Google
Google GitHub
GitHub Linkedin
Linkedin
Hello Guys,
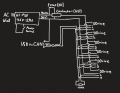
Im currently in the process of designing and then building a robotic arm. And now im designing the electronics for it. They should be pretty simple "i hope". I've attached a picture of the circuit that I am currently designing on, and maybe you notice im not an electrical engineer xD.
I now need some advice on safety precautions that I have to implement into my system to really make it safe and reliable. I'm thinking about fuses that I'd need, circuit breakers and all this good stuff. Maybe also to know using very expensive components is not really an option because i have some limited budget, but I want to make it as safe as possible with my possibilities, but let me now if there is somthing expensive where there is now way around.
Quickly what circuit I have currently planned:
I would like to have the main power supply which is controlled by a switch that is connectet to pins on the PSU that allow for easy turning on and off. Then I have my 36v dc voltage that my motorcontrollers use. In order to implement a emergency stop I would use a simple one pole contactor that is NO and when 36V from the NC of the emergency stop is connected it should allow for current to flow to the motorcontrollers. Else it would stop current to all Motorcontrollers. For the controll of the robot I use CAN bus with an adapter to my laptop, but I think this part is okay, its more with the powersupply and emergency stop that I need help with.
Thanks a lot in advance for your help!
Regards Jonas
Im currently in the process of designing and then building a robotic arm. And now im designing the electronics for it. They should be pretty simple "i hope". I've attached a picture of the circuit that I am currently designing on, and maybe you notice im not an electrical engineer xD.
I now need some advice on safety precautions that I have to implement into my system to really make it safe and reliable. I'm thinking about fuses that I'd need, circuit breakers and all this good stuff. Maybe also to know using very expensive components is not really an option because i have some limited budget, but I want to make it as safe as possible with my possibilities, but let me now if there is somthing expensive where there is now way around.
Quickly what circuit I have currently planned:
I would like to have the main power supply which is controlled by a switch that is connectet to pins on the PSU that allow for easy turning on and off. Then I have my 36v dc voltage that my motorcontrollers use. In order to implement a emergency stop I would use a simple one pole contactor that is NO and when 36V from the NC of the emergency stop is connected it should allow for current to flow to the motorcontrollers. Else it would stop current to all Motorcontrollers. For the controll of the robot I use CAN bus with an adapter to my laptop, but I think this part is okay, its more with the powersupply and emergency stop that I need help with.
Thanks a lot in advance for your help!
Regards Jonas
Attachments
-
 357.8 KB Views: 10
357.8 KB Views: 10



