 Facebook
Facebook Google
Google GitHub
GitHub Linkedin
Linkedin
I'm making a couple of PCBs BASE/TRANSMITTER and REMOTE/MODEL RECEIVER using surface mount components, and PICs, for use as remote control by location (3D).
Remote control by location, is when a location is sent from the BASE (Transmitter) and the REMOTE (Model) goes to that location. This includes GPS COORDINATES, ALTITUDE and COMPASS BEARING,.SENSORS.
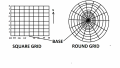
For the first tests, 'the field' will be thought of as a SQUARE GRID, see attached. (The CIRCLE GRID may be for the future)
START UP: The REMOTE is at the BASE LOCATION, HEIGHT aiming NORTH. All location settings are ZEROed, so now both BASE and REMOTE are set to ZERO.
The easiest component of the location dimensions to explain is ALTITUDE. Normally for a model to gain ALTITUDE is to move the THROTTLE forward and the motor/s speed up. In this case the THROTTLE will add ALTITUDE to the previous setting, 'say' ALTITUDE + 1 (+1 if THROTTLE held forward) could be 1Mtr above ground, so the motor/s will speed up till 1MTr is achieved, then control a 1MTR ALTITUDE till another setting is sent, and so on. In a similar way the other DIMENSIONS (3D) can be set, by this method.
The BASE PCB (18F46K20) will be built into a radio control TRANSMITTER, the REMOTE RECEIVER (18F46K20 + 18LF2520) will be built into the MODEL. The BASE will use the STICKS pots/SWITCHES outputs to calculate a set of numbers to transmit to the REMOTE, which will use them, combined with it's own SENSORS to calculate PWMs which it will pass to the 182520 PIC on it's PCB, to control the SERVOS/MOTORS.
Camerart.
Remote control by location, is when a location is sent from the BASE (Transmitter) and the REMOTE (Model) goes to that location. This includes GPS COORDINATES, ALTITUDE and COMPASS BEARING,.SENSORS.
For the first tests, 'the field' will be thought of as a SQUARE GRID, see attached. (The CIRCLE GRID may be for the future)
START UP: The REMOTE is at the BASE LOCATION, HEIGHT aiming NORTH. All location settings are ZEROed, so now both BASE and REMOTE are set to ZERO.
The easiest component of the location dimensions to explain is ALTITUDE. Normally for a model to gain ALTITUDE is to move the THROTTLE forward and the motor/s speed up. In this case the THROTTLE will add ALTITUDE to the previous setting, 'say' ALTITUDE + 1 (+1 if THROTTLE held forward) could be 1Mtr above ground, so the motor/s will speed up till 1MTr is achieved, then control a 1MTR ALTITUDE till another setting is sent, and so on. In a similar way the other DIMENSIONS (3D) can be set, by this method.
The BASE PCB (18F46K20) will be built into a radio control TRANSMITTER, the REMOTE RECEIVER (18F46K20 + 18LF2520) will be built into the MODEL. The BASE will use the STICKS pots/SWITCHES outputs to calculate a set of numbers to transmit to the REMOTE, which will use them, combined with it's own SENSORS to calculate PWMs which it will pass to the 182520 PIC on it's PCB, to control the SERVOS/MOTORS.
Camerart.
Attachments
-
 132.9 KB Views: 36
132.9 KB Views: 36 -
 26.8 KB Views: 33
26.8 KB Views: 33
Last edited:
") The only two values that it'll default to is 0x50 or 0x70 - so you can't configure it to 0x40 by this bit, and you'll have to override it anyway."
The only two values that it'll default to is 0x50 or 0x70 - so you can't configure it to 0x40 by this bit, and you'll have to override it anyway."




