Facebook
Facebook Google
Google GitHub
GitHub Linkedin
Linkedin
Hi all,
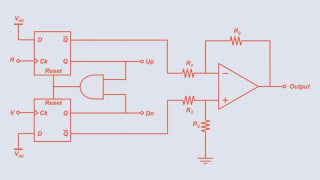
I've been working on a simple brushed motor semi autonomous flying robot. Attached is the backup idea I'm asking about in case the main idea (secret) fails. I am a total rookie with circuits in general, so I could use some circuit analysis. Would this attached circuit, at least in theory, work?
I'll try to describe the hypothetical robot...
A bright lamp flashing at a specific frequency would act as the remote control beacon. The flying robot has a motor that propels the plane straight ahead ascending, but when the motor is off, a special mechanism would cause the robot to glide and turn sharply, descending.
The circuit would use two light dependent resistors along with two capacitors to act as light sensors. Since capacitors can block DC but pass AC, one LDR+C pair passes electricity and powers on the motor only while it detects the flashing frequency of the ground beacon. (Capacitor passes primarily the frequency range of the remote controller beacon.) The second pair would, in theory, cause the motor to shut off while light fluctuates at the frequency range separate from the beacon receiver part. That light would fluctuate from the shadows of objects the robot encounters as it approaches an obstacle.
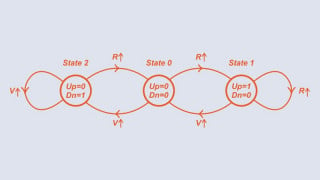
When the robot flies to the edge of the beacon range, it should shut off the motor, and rotate back into range, restarting the motor. So it would hopefully dodge obstacles, and also orbit (not in a circle shape) around the beacon's light, all autonomously.
Is this hare brained nonsense, or might it work?
Sorry in advance for my awful handwriting!

I've been working on a simple brushed motor semi autonomous flying robot. Attached is the backup idea I'm asking about in case the main idea (secret) fails. I am a total rookie with circuits in general, so I could use some circuit analysis. Would this attached circuit, at least in theory, work?
I'll try to describe the hypothetical robot...
A bright lamp flashing at a specific frequency would act as the remote control beacon. The flying robot has a motor that propels the plane straight ahead ascending, but when the motor is off, a special mechanism would cause the robot to glide and turn sharply, descending.
The circuit would use two light dependent resistors along with two capacitors to act as light sensors. Since capacitors can block DC but pass AC, one LDR+C pair passes electricity and powers on the motor only while it detects the flashing frequency of the ground beacon. (Capacitor passes primarily the frequency range of the remote controller beacon.) The second pair would, in theory, cause the motor to shut off while light fluctuates at the frequency range separate from the beacon receiver part. That light would fluctuate from the shadows of objects the robot encounters as it approaches an obstacle.
When the robot flies to the edge of the beacon range, it should shut off the motor, and rotate back into range, restarting the motor. So it would hopefully dodge obstacles, and also orbit (not in a circle shape) around the beacon's light, all autonomously.
Is this hare brained nonsense, or might it work?
Sorry in advance for my awful handwriting!