Facebook
Facebook Google
Google GitHub
GitHub Linkedin
Linkedin
Hi all,
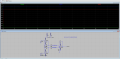
I have the circuit attached as a way to ramp voltage up and down based on a customer's input of dual 4-20mA signals. This will then be turned into a PWM signal to control our motor. Is there a graceful way to handle the 4-20mA signals, as there can't be an instantaneous change. The ramp must go to zero before ramping up again (forward -> idle -> reverse). Thank you for your help.

I have the circuit attached as a way to ramp voltage up and down based on a customer's input of dual 4-20mA signals. This will then be turned into a PWM signal to control our motor. Is there a graceful way to handle the 4-20mA signals, as there can't be an instantaneous change. The ramp must go to zero before ramping up again (forward -> idle -> reverse). Thank you for your help.