Facebook
Facebook Google
Google GitHub
GitHub Linkedin
Linkedin
Hello, I am a master thesis student at LTH who is currently working on creating a prototype which can measure the human knee joint angle for 24 hours. I am using two BNO055 sensors which are placed on the shank and thigh.
I get the quaternion values and find the absolute value from both in which i get the angle value. I tried running some measurements on humans and they seem to be really fine, however, when i do the measurements for a longer period of time (for example more than 20 minutes), my readings get drifted. Now my guess is that the drifting is coming from the gyroscope. I tried the different operational modes : IMUPLUS, NDOF in which i can measure the relative angle and absolute angle. Both are giving me the same error. When measure for a short period of time, it does not seem to be any problem.
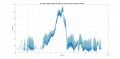
I will post some screenshots where you can see how my drift values look (x-axis is time in seconds since arduino started, and y-axis the knee joint angle)
Now I am wondering if you can help me with that. What operational mode do you think i should try? I tried IMU and NDOF, but they both seem to be giving me the same error for a longer period of time.
I also tried placing the sensors in a stationary position for 30 minutes and they did not seem to get any drifting problems. I just get that once i start walking around with the sensors.
Any help or tips would be really appreciated! Thank you! I will also post my arduino code.
best wishes,
Anza
I get the quaternion values and find the absolute value from both in which i get the angle value. I tried running some measurements on humans and they seem to be really fine, however, when i do the measurements for a longer period of time (for example more than 20 minutes), my readings get drifted. Now my guess is that the drifting is coming from the gyroscope. I tried the different operational modes : IMUPLUS, NDOF in which i can measure the relative angle and absolute angle. Both are giving me the same error. When measure for a short period of time, it does not seem to be any problem.
I will post some screenshots where you can see how my drift values look (x-axis is time in seconds since arduino started, and y-axis the knee joint angle)
Now I am wondering if you can help me with that. What operational mode do you think i should try? I tried IMU and NDOF, but they both seem to be giving me the same error for a longer period of time.
I also tried placing the sensors in a stationary position for 30 minutes and they did not seem to get any drifting problems. I just get that once i start walking around with the sensors.
Any help or tips would be really appreciated! Thank you! I will also post my arduino code.
best wishes,
Anza
Code:
Adafruit_BNO055 bno = Adafruit_BNO055(55, BNO055_ADDRESS_A);
Adafruit_BNO055 bno1 = Adafruit_BNO055(55,BNO055_ADDRESS_B);
SdFat SD;
//SdFile myFile;
File myFile;
unsigned long id = 1;
const int chipSelect = SS;
#define SD_CS_PIN SS
unsigned long time;
long timeInterval = 10000;
long previousTime = 0;
const int buttonPin = 9;
int buttonState = 0;
long previousMillis = 0;
unsigned long StartTime = millis();
int LED = 6;
const uint8_t BASE_NAME_SIZE = sizeof(FILE_BASE_NAME) -1;
char fileName[] = FILE_BASE_NAME "00.txt";
void setup(void)
{
//115200
Serial.begin(115200);
Serial.println(F("Relative angle measurement")); Serial.println("");
Serial.print(F("Initializing SD card..."));
/* Initialise the sensor */
if(!bno.begin())
{
/* There was a problem detecting the BNO055 ... check your connections */
Serial.print(F("Ooops, no BNO055 detected ... Check your wiring or I2C ADDR!"));
while(1);
}
if(!bno1.begin())
{
/* There was a problem detecting the BNO055 ... check your connections */
Serial.print(F("Ooops, no BNO055 second detected ... Check your wiring or I2C ADDR!"));
while(1);
}
pinMode(SS, OUTPUT);
// if (!SD.begin(10)) {
// Serial.println("initialization failed, program stopped!");
// exit(0);
//SD.begin(SD_CS_PIN, SPI_FULL_SPEED);
if (!SD.begin(SD_CS_PIN)) {
Serial.println(F("initialization failed!"));
exit(0);
}
Serial.println(F("initialization done."));
//For creating a text file in SD card.
while(SD.exists(fileName)) {
if(fileName[BASE_NAME_SIZE +1] != '9'){
fileName[BASE_NAME_SIZE +1]++;
} else if (fileName[BASE_NAME_SIZE] != '9') {
fileName[BASE_NAME_SIZE +1] = '0';
fileName[BASE_NAME_SIZE]++;
} else {
Serial.println(F("Can't create file name"));
return;
}
}
myFile = SD.open(fileName, O_CREAT | O_WRITE);
if(!myFile) {
Serial.println(F("Open failed"));
return;
}
Serial.print(F("Opened: "));
Serial.println(fileName);
bno.setMode(bno.OPERATION_MODE_NDOF);
bno1.setMode(bno.OPERATION_MODE_NDOF);
bno.setExtCrystalUse(true);
bno1.setExtCrystalUse(true);
void loop(void)
{
unsigned long CurrentTime = millis();
unsigned long ElapsedTime = CurrentTime - StartTime;
buttonState = digitalRead(buttonPin);
sensors_event_t event;
bno.getEvent(&event);
bno1.getEvent(&event);
//Get quaternion values.
imu::Quaternion quat = bno.getQuat();
imu::Quaternion quat2 = bno1.getQuat();
quat.normalize();
quat2.normalize();
//Formula for the absolute angle between two quaternions.
double relDeg = 57.2958*2*acos(abs(quat.w()*quat2.w() + quat.x()*quat2.x() + quat.y()*quat2.y()+quat.z()*quat2.z()));Attachments
-
 73.1 KB Views: 10
73.1 KB Views: 10 -
 69.2 KB Views: 10
69.2 KB Views: 10 -
 65.3 KB Views: 8
65.3 KB Views: 8 -
 75 KB Views: 7
75 KB Views: 7