 Facebook
Facebook Google
Google GitHub
GitHub Linkedin
Linkedin
This question is about understanding stability in a control system.
The 2 slides below are taken from the lecture slides that are available at:
https://control.asu.edu/Classes/MAE318/318Lecture10.pdf

Long story short, the slides are telling us that if we close the initial loop with a gain of 1000, the entire system will become unstable.
I disagree with what is being said. I think that the system will still be stable.
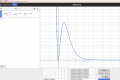
I believe so, because when you convert the Closed-loop Transfer Function from the Laplace domain to the time domain, we see that the system reaches steady state nicely and neatly within 2 seconds as shown in the blue graph below.


I do not see anything unstable in the graph above. ( I am assuming that a system is unstable if the graph looks like a sine wave but if it "cools down" and flattens out, then it means that it is stable).
Can someone please tell me where am I wrong, if I am wrong?
Ty
The 2 slides below are taken from the lecture slides that are available at:
https://control.asu.edu/Classes/MAE318/318Lecture10.pdf
Long story short, the slides are telling us that if we close the initial loop with a gain of 1000, the entire system will become unstable.
I disagree with what is being said. I think that the system will still be stable.
I believe so, because when you convert the Closed-loop Transfer Function from the Laplace domain to the time domain, we see that the system reaches steady state nicely and neatly within 2 seconds as shown in the blue graph below.
I do not see anything unstable in the graph above. ( I am assuming that a system is unstable if the graph looks like a sine wave but if it "cools down" and flattens out, then it means that it is stable).
Can someone please tell me where am I wrong, if I am wrong?
Ty
Attachments
-
 140 KB Views: 0
140 KB Views: 0






