 Facebook
Facebook Google
Google GitHub
GitHub Linkedin
Linkedin
Hi - I'm looking at a golf scooter donated to a friend, for use as a mobility scooter. But two or more people fiddled with the non-working throttle and controller before me, including replacing at least one MOSFET with a bad soldering job. There is no longer any throttle mechanism, nor a charger. Don't ask! My local electronics friends (we tend to do microcontroller projects) have suggested "just gut it and build your own controller from scratch" which I may ultimately need to do... But for now, I'm learning a bit and having some fun trying to figure out some things.
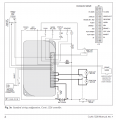
The not-working controller is a Curtis 1228-2730, capable of 110 Amps at 24 V. The controller is for full four-quadrant operation, can drive forward or reverse and can handle regenerative braking. The cart and the motor are unbranded, other than it says 24V G2-2A which is hand- engraved on the cover plate. It looks like all-in-one-assembly motor/transaxle/differential/brake, like some I can find online from China.
The PIC microcontroller outputs some flashing LED patterns for indicating errors. Some of these make sense, so something works okay. For example, if I mechanically release (bypass) the brake in the motor (which also opens an internal switch in the brake circuit in the motor), or I disconnect the brake circuit, the controller gives me "brake fault" LED patterns. And I can provoke a few other error situations - e.g. attempt to start the cart with the throttle open. But I also get a pattern that isn't on the diagnostic menu (2, 2) that I can't clear. And I cannot replicate on my workbench what it does in the cart - periodic clicking noises from, I think, the relay in the controller, about 70 per minute. I have what are supposed to be dummy brake circuits and motor loads on the controller on my workbench, but its evidently not the same.
Anyway here is the question: I'm wanting an overview (a guess really) of how this brake circuit typically interacts with the motor drive circuit. There are separate wires into the motor for the "brake" and its only rated at 1 Amp in the controller specs. So
a) when does the brake engage? Is this purely to hold the vehicle still while you sink your putt on the green?
b) is it likely binary (on/off) or can one apply more or less current to partially brake via this mechanism?
c) is it mechanical? And by default, somehow when you turn the cart off, should the brake remain engaged?
I did find somewhere in my readings that part of setting the controller throttle parameters one should slowly open the throttle until one hears the click (which I think is supposed to be the brake disengaging). That would mean "binary, mechanical, brake engaged when no power", I guess. I think the settable parameter is a threshold that says "don't push power through the motor until you're close to getting the brake off".
Any hints or big-picture stuff or places to read where I can get some handle on this will be useful.
My next step is to try to get the serial interface working to the controller and see if I can get better diagnostics. I don't have access to a Curtis diagnostic programming tool, but there is some PC software that looks like it can do the job if I can get the USB to serial link up.
Thanks for any help.
Peter
The not-working controller is a Curtis 1228-2730, capable of 110 Amps at 24 V. The controller is for full four-quadrant operation, can drive forward or reverse and can handle regenerative braking. The cart and the motor are unbranded, other than it says 24V G2-2A which is hand- engraved on the cover plate. It looks like all-in-one-assembly motor/transaxle/differential/brake, like some I can find online from China.
The PIC microcontroller outputs some flashing LED patterns for indicating errors. Some of these make sense, so something works okay. For example, if I mechanically release (bypass) the brake in the motor (which also opens an internal switch in the brake circuit in the motor), or I disconnect the brake circuit, the controller gives me "brake fault" LED patterns. And I can provoke a few other error situations - e.g. attempt to start the cart with the throttle open. But I also get a pattern that isn't on the diagnostic menu (2, 2) that I can't clear. And I cannot replicate on my workbench what it does in the cart - periodic clicking noises from, I think, the relay in the controller, about 70 per minute. I have what are supposed to be dummy brake circuits and motor loads on the controller on my workbench, but its evidently not the same.
Anyway here is the question: I'm wanting an overview (a guess really) of how this brake circuit typically interacts with the motor drive circuit. There are separate wires into the motor for the "brake" and its only rated at 1 Amp in the controller specs. So
a) when does the brake engage? Is this purely to hold the vehicle still while you sink your putt on the green?
b) is it likely binary (on/off) or can one apply more or less current to partially brake via this mechanism?
c) is it mechanical? And by default, somehow when you turn the cart off, should the brake remain engaged?
I did find somewhere in my readings that part of setting the controller throttle parameters one should slowly open the throttle until one hears the click (which I think is supposed to be the brake disengaging). That would mean "binary, mechanical, brake engaged when no power", I guess. I think the settable parameter is a threshold that says "don't push power through the motor until you're close to getting the brake off".
Any hints or big-picture stuff or places to read where I can get some handle on this will be useful.
My next step is to try to get the serial interface working to the controller and see if I can get better diagnostics. I don't have access to a Curtis diagnostic programming tool, but there is some PC software that looks like it can do the job if I can get the USB to serial link up.
Thanks for any help.
Peter
Attachments
-
 88.6 KB Views: 22
88.6 KB Views: 22




