how to include method interpolations for microcontroller for control motor servo ?? i need formula to methot interpolations.. i need disperately to help.. thanks
risky
how to include method interpolations for microcontroller for control motor servo ?? i need formula to methot interpolations.. i need disperately to help.. thanks
risky
ok..thanks for your answer...a formula interpolations combined with progam servo motor.. do you help me.. i need flow chart diagram because i still confused for combinations..
ok..thanks for your answer...a formula interpolations combined with progam servo motor.. do you help me.. i need flow chart diagram because i still confused for combinations..
I don't understand what you want to do. To control a servo motor you compare the command position to the feedback position and apply the error signal as the servo command. I don't see what interpolation has to do with controlling a servo motor. Maybe you could explain it to a poor controls engineer who just retired after half a century of doing this stuff.
Maybe you could give me some context are we talking about aircraft control or machine tools?
I don't understand what you want to do. To control a servo motor you compare the command position to the feedback position and apply the error signal as the servo command. I don't see what interpolation has to do with controlling a servo motor. Maybe you could explain it to a poor controls engineer who just retired after half a century of doing this stuff.
i will make a trainer water level control there are 2 different tank layout its height. A tank (the top) to supply water to the tank bottom (b) by opening the water faucet using servo motors. filling of the tank bottom is determined by entering the input waktu.proses closing of the door water faucet on slowly perfect by comparing the value of the water .. the point is below the water level can be in control of servo motor angle and volume can be determined by entering input value as a reference..method interpolations used as method reduce error reading sensor ultrasonic.
So you have an ultrasonic sensor whose readings are subject to more error than is acceptable. I'm sorry, but no interpolation method that I am familiar with is going to do anything to help you reduce the error of your sensor readings. Where do such such ideas come from? Did someone tell you this was an appropriate solution or did you think this up on your own? Perhaps you are confusing us by choosing the word "interpolation" when you actually mean another word. I'm sorry that you're having difficulty expressing yourself in English, but your English is clearly better than my...whatever your first language is.
From my career in CNC and Motion control, my definition of interpolation indicates a specific control of two or more servo motors to follow or create a precise trajectory path, two or more servo's that do not interpolate are considered a point-to-point system.
Max.
So you have an ultrasonic sensor whose readings are subject to more error than is acceptable. I'm sorry, but no interpolation method that I am familiar with is going to do anything to help you reduce the error of your sensor readings. Where do such such ideas come from? Did someone tell you this was an appropriate solution or did you think this up on your own? Perhaps you are confusing us by choosing the word "interpolation" when you actually mean another word. I'm sorry that you're having difficulty expressing yourself in English, but your English is clearly better than my...whatever your first language is.
im sorry..im heaving difficulty expressing in english..because im just know english language.. I've tried to interpret from my language into English..I will try to learn english.my first language is java language.. so what method suitable for water level controll above?
From my career in CNC and Motion control, my definition of interpolation indicates a specific control of two or more servo motors to follow or create a precise trajectory path, two or more servo's that do not interpolate are considered a point-to-point system.
Max.
im sorry..im heaving difficulty expressing in english..because im just know english language.. I've tried to interpret from my language into English..I will try to learn english.my first language is java language.. so what method suitable for water level controll above?
This would be the language spoken on the island of Java in the country of Indonesia, and not the computer language Java. Now I am certain that your English is better than my "language of Java".
Are you asking for a method to smooth or to filter the data samples from the ultrasonic sensor in some fashion, so that your control system will not be constantly opening and closing the valve as the errors appear in the data. The answer is yes there are methods to do this. You should do research on "Smoothing Algorithms" and "Filtering Algorithms".
Is your control of flow rate from upper tank to lower tank intended to be proportional or ON/OFF?
This would be the language spoken on the island of Java in the country of Indonesia, and not the computer language Java. Now I am certain that your English is better than my "language of Java".
Are you asking for a method to smooth or to filter the data samples from the ultrasonic sensor in some fashion, so that your control system will not be constantly opening and closing the valve as the errors appear in the data. The answer is yes there are methods to do this. You should do research on "Smoothing Algorithms" and "Filtering Algorithms".
Is your control of flow rate from upper tank to lower tank intended to be proportional or ON/OFF?
thanks for your answer.... yes it true..in upper tank there flow meter for reading water volume coming out and reading for flow meter on feedback to microcontroller, water level control to be proposional..
just as you say the data is retrieved and filtered later in the process and in the average value was taken for.so that control system will not be constantly opening and closing as the errors appear in the data...
I need your help please let me know about "Smoothing Algorithms" and "Filtering Algorithms". because I was unfamiliar with the "Smoothing Algorithms" and "Filtering Algorithms".
First we must define the output parameters. the sampling volume and the maximum time is needed and the minimum time needed to fill the entire tank (b). after specifies parameters taken from the sample then the tool is ready in use
for example: assumsikan value of time and the volume of water that we want that our input .. then the program reads the value of time and the volume that we enter. when the value of time and the volume does not exceed the specified parameters, the tool will be active
assumption maximum parameters: parameter volume: 100cc
parameters time: 120 seconds
assumption of time and the volume we want: time 50 seconds
and a volume of 700 cc. then the tool will fill the tank with a volume of 700 cc .and ..error time for 50 seconds in the estimate of 2%. the process of closing and opening the faucet terganung of input time and volume that we go right.
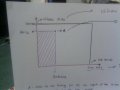
descriptions of figure
(A)value we find as an input of the servo motor to determine the opening angle of the tap water.
First we must define the output parameters. the sampling volume and the maximum time is needed and the minimum time needed to fill the entire tank (b). after specifies parameters taken from the sample then the tool is ready in use
for example: assumsikan value of time and the volume of water that we want that our input .. then the program reads the value of time and the volume that we enter. when the value of time and the volume does not exceed the specified parameters, the tool will be active
assumption maximum parameters: parameter volume: 100cc
parameters time: 120 seconds
assumption of time and the volume we want: time 50 seconds
and a volume of 700 cc. then the tool will fill the tank with a volume of 700 cc .and ..error time for 50 seconds in the estimate of 2%. the process of closing and opening the faucet terganung of input time and volume that we go right.
descriptions of figure
(A)value we find as an input of the servo motor to determine the opening angle of the tap water.
 Facebook
Facebook Google
Google GitHub
GitHub Linkedin
Linkedin