Facebook
Facebook Google
Google GitHub
GitHub Linkedin
Linkedin
Hi,
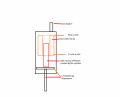
I am missing an idea how to get distance values out of a sensor which is a single coil with a steel bolt inside which is moving while position is changed. I need to get linear values which I can feed into an analog input of a Teensy which then will convert this values and send it on a CAN bus like network (NMEA2K)
Since this sensors are without any description it is hard to find out what kind of preferendes those have. What I know is that it is a coil with to wires so I guess the whoe thing is based on inductance.
How can I design the cirquit to interface inductive sensors to feed the analog 3.3 V inputs? I was reading a lot and came on LVDT so I bought some LM339 already but still unsure how to do this as simple as possible.
This sensors shel give back the position of tabs moving slowly up and down.
Attached a drawing.
THX for help!
I am missing an idea how to get distance values out of a sensor which is a single coil with a steel bolt inside which is moving while position is changed. I need to get linear values which I can feed into an analog input of a Teensy which then will convert this values and send it on a CAN bus like network (NMEA2K)
Since this sensors are without any description it is hard to find out what kind of preferendes those have. What I know is that it is a coil with to wires so I guess the whoe thing is based on inductance.
How can I design the cirquit to interface inductive sensors to feed the analog 3.3 V inputs? I was reading a lot and came on LVDT so I bought some LM339 already but still unsure how to do this as simple as possible.
This sensors shel give back the position of tabs moving slowly up and down.
Attached a drawing.
THX for help!
Attachments
-
 395.7 KB Views: 11
395.7 KB Views: 11
Last edited:
 i guess the "figure out my product with no images and description" -- starts to get uninteresting . . .
i guess the "figure out my product with no images and description" -- starts to get uninteresting . . .