Facebook
Facebook Google
Google GitHub
GitHub Linkedin
Linkedin
Hello,
I am trying to send 20,000KB of data through some LED display panels.
I am using SPI to send the data from the MCU and it is converted into RS485 so it can transmit the data through the length of the sign which is roughly about 8 meters.
As I need to detect any errors in the sign the data is returned through each LED panel and back to the MCU.
Currently only the data is returned and this limits the speed I can drive the sign to about 3MHz.
As only the MOSI signal is being returned to the MCU the data is out of sync with the SCK
After reading the application note from TI attached to this email it says by returning the clock signal and setting up the MCU as a slave the MOSI and SCK will still be in sync.
I have tried this method with some development boards (teensy4.1 and ESP32) and have successfully sent data between a master and a slave at speeds up to 30MHz.
The only issue is I was limited to the amount of data I was able to receive.
I was using a few libraries for the slave https://github.com/hideakitai/ESP32SPISlave and https://github.com/tonton81/SPISlave_T4 and they are both limited to only receive about 32 bytes of data.
Is there an easy way for me to read up to 20,000 bytes of data with any MCU configured as an SPI slave or is there a better solution to what I am trying to achieve?
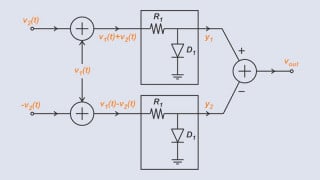
I have also attached a drawing for an example.
Thanks
Craig
I am trying to send 20,000KB of data through some LED display panels.
I am using SPI to send the data from the MCU and it is converted into RS485 so it can transmit the data through the length of the sign which is roughly about 8 meters.
As I need to detect any errors in the sign the data is returned through each LED panel and back to the MCU.
Currently only the data is returned and this limits the speed I can drive the sign to about 3MHz.
As only the MOSI signal is being returned to the MCU the data is out of sync with the SCK
After reading the application note from TI attached to this email it says by returning the clock signal and setting up the MCU as a slave the MOSI and SCK will still be in sync.
I have tried this method with some development boards (teensy4.1 and ESP32) and have successfully sent data between a master and a slave at speeds up to 30MHz.
The only issue is I was limited to the amount of data I was able to receive.
I was using a few libraries for the slave https://github.com/hideakitai/ESP32SPISlave and https://github.com/tonton81/SPISlave_T4 and they are both limited to only receive about 32 bytes of data.
Is there an easy way for me to read up to 20,000 bytes of data with any MCU configured as an SPI slave or is there a better solution to what I am trying to achieve?
I have also attached a drawing for an example.
Thanks
Craig
Attachments
-
145.8 KB Views: 8
-
149.4 KB Views: 6