Facebook
Facebook Google
Google GitHub
GitHub Linkedin
Linkedin
Hello...
I am working on this:

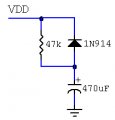
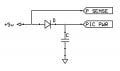
I want to save the current display number in EEPROM so that when power is removed and reapplied it will restore to this number. Pressing the rotary encoder to reset the count.
With everything that I have tried doing the display flickers when incrementing or decrementing the count using the rotary encoder because of the 5mS of time required to write to the EEPROM. So I have tried writing on-the-fly i.e each time the display number changes it gets written to memory.
Any suggestions? Much appreciated!
My code is here:
I am working on this:
I want to save the current display number in EEPROM so that when power is removed and reapplied it will restore to this number. Pressing the rotary encoder to reset the count.
With everything that I have tried doing the display flickers when incrementing or decrementing the count using the rotary encoder because of the 5mS of time required to write to the EEPROM. So I have tried writing on-the-fly i.e each time the display number changes it gets written to memory.
Any suggestions? Much appreciated!
My code is here:
Code:
unsigned short i = 0;
unsigned short j = 0;
unsigned short scan = 0;
unsigned short rLeft = 0;
unsigned short rRight = 0;
unsigned short rotating = 0;
signed short ones = 0;
signed short tens = 0;
signed short hundreds = 0;
signed short thousands = 0;
// :: Defines :: //
// Displays ...
#define dslpD PORTA.F1
#define dslpC PORTA.F0
#define dslpB PORTA.F3
#define dslpA PORTA.F2
// Segments ...
#define segA PORTB.F7
#define segB PORTB.F5
#define segC PORTB.F3
#define segD PORTB.F2
#define segE PORTB.F1
#define segF PORTB.F6
#define segG PORTB.F4
#define rotary02 PORTB.F0
#define rotary01 PORTA.F4
#define rotary03 PORTB.F3
void num0()
{
segA = 1;
segB = 1;
segC = 1;
segD = 1;
segE = 1;
segF = 1;
}
void num1()
{
segB = 1;
segC = 1;
}
void num2()
{
segA = 1;
segB = 1;
segG = 1;
segD = 1;
segE = 1;
}
void num3()
{
segA = 1;
segB = 1;
segC = 1;
segD = 1;
segG = 1;
}
void num4()
{
segF = 1;
segG = 1;
segB = 1;
segC = 1;
}
void num5()
{
segA = 1;
segF = 1;
segG = 1;
segC = 1;
segD = 1;
}
void num6()
{
segA = 1;
segC = 1;
segD = 1;
segE = 1;
segF = 1;
segG = 1;
}
void num7()
{
segA = 1;
segB = 1;
segC = 1;
}
void num8()
{
segA = 1;
segB = 1;
segC = 1;
segD = 1;
segE = 1;
segF = 1;
segG = 1;
}
void num9()
{
segA = 1;
segB = 1;
segC = 1;
segF = 1;
segG = 1;
}
void blankDigit()
{
segA = 0;
segB = 0;
segC = 0;
segD = 0;
segE = 0;
segF = 0;
segG = 0;
}
void displayOff()
{
dslpA = 0;
dslpB = 0;
dslpC = 0;
dslpD = 0;
}
void decCount()
{
if (ones != 0 || tens != 0 || hundreds != 0 || thousands != 0)
{
ones--;
if (ones < 0)
{
if (tens > 0)
{
ones = 9;
tens --;
}
else if (hundreds > 0)
{
if (tens == 0)
{
tens = 9;
ones = 9;
hundreds --;
}
}
else if (thousands > 0)
{
if (hundreds == 0)
{
if (tens == 0)
{
tens = 9;
ones = 9;
hundreds = 9;
thousands --;
}
}
}
}
}
}
void incCount()
{
if (ones != 9 || tens != 9 || hundreds != 9 || thousands != 9)
{
ones++;
if (ones > 9)
{
ones = 0;
tens ++;
}
if (tens > 9)
{
tens = 0;
hundreds ++;
}
if (hundreds > 9)
{
hundreds = 0;
thousands ++;
}
}
}
void rstCount()
{
ones = 0;
tens = 0;
hundreds = 0;
thousands = 0;
}
void pollRotaryEncoder()
{
TRISB = 0x09;
if (rotary03 == 0)
{
rstCount();
}
TRISB = 0x01;
if (rotary01 == 0)
{
if (rotary02 == 0)
{
rotating = 1;
}
}
if (rotating == 1)
{
if (rotary01 == 1)
{
rRight = 1;
rotating = 0;
}
if (rotary02 == 1)
{
rLeft = 1;
rotating = 0;
}
}
if (rotary01 == 1)
{
if (rotary02 == 1)
{
if (rleft == 1)
{
incCount();
rLeft = 0;
}
if (rRight == 1)
{
decCount();
rRight = 0;
}
}
}
}
void setDigit(signed short digit)
{
switch (digit)
{
case 0:
num0();
break;
case 1:
num1();
break;
case 2:
num2();
break;
case 3:
num3();
break;
case 4:
num4();
break;
case 5:
num5();
break;
case 6:
num6();
break;
case 7:
num7();
break;
case 8:
num8();
break;
case 9:
num9();
break;
case 10:
blankDigit();
break;
}
}
void multiplexDisplays()
{
displayOff();
blankDigit();
switch (scan)
{
case 0:
setDigit(ones);
dslpA = 1;
break;
case 1:
setDigit(tens);
dslpB = 1;
break;
case 2:
setDigit(hundreds);
dslpC = 1;
break;
case 3:
setDigit(thousands);
dslpD = 1;
break;
}
scan++;
if (scan == 4)
{
scan = 0;
}
}
void main()
{
CMCON = 7; // Disable analog comparators
TRISA = 0x10; // PortA as output ...
TRISB = 0x01; // 4 inputs & 4 outputs
PORTA = 0x00; // Init port, all pins low
PORTB = 0x00; // Init port, all pins low
Delay_ms(500);
// :: Infinite program loop :: //
while(1)
{
multiplexDisplays();
Delay_us(100);
pollRotaryEncoder();
}
}Attachments
-
 231.9 KB Views: 2,375
231.9 KB Views: 2,375
")