 Facebook
Facebook Google
Google GitHub
GitHub Linkedin
Linkedin
Hi guys, I need your help! It's my first time building electronic circuits and I'm really struggling as I'm a total noob when it comes to electronics.
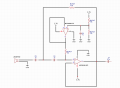
I'm building a SONAR and I'm using an Arduino Due (mainly due to its higher ADC speed, as the sonar works at 25kHz). I've checked the entire transmission line and I'm sure that everything there works fine.
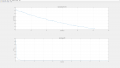
Analyzing the receiving line, though, I noticed a couple of strange things. Since I don't have an oscilloscope, I'm using the analog pin of my Arduino to check the signal. I transmit a continuous 25 kHz wave for the debugging. When I read the raw input from the receiver (detaching all the circuit that follows the receiver), I see a signal that decreases in steps, and I don't understand why.
Furthermore, after filtering it with a Sallen-Key filter (high-pass with cut -off frequency at 20 kHz), I still see a decaying trend in the output while ideally i expect a signal centered in 0 and filtered.
My question is: do you have any clue why I don't simply receive a 25kHz wave (with some noise, obviously) and why my filter doesn't seem to work?
I'd be really grateful for any help!!!
I'm building a SONAR and I'm using an Arduino Due (mainly due to its higher ADC speed, as the sonar works at 25kHz). I've checked the entire transmission line and I'm sure that everything there works fine.
Analyzing the receiving line, though, I noticed a couple of strange things. Since I don't have an oscilloscope, I'm using the analog pin of my Arduino to check the signal. I transmit a continuous 25 kHz wave for the debugging. When I read the raw input from the receiver (detaching all the circuit that follows the receiver), I see a signal that decreases in steps, and I don't understand why.
Furthermore, after filtering it with a Sallen-Key filter (high-pass with cut -off frequency at 20 kHz), I still see a decaying trend in the output while ideally i expect a signal centered in 0 and filtered.
My question is: do you have any clue why I don't simply receive a 25kHz wave (with some noise, obviously) and why my filter doesn't seem to work?
I'd be really grateful for any help!!!
Attachments
-
 119.7 KB Views: 14
119.7 KB Views: 14 -
 118.4 KB Views: 14
118.4 KB Views: 14 -
 122.5 KB Views: 14
122.5 KB Views: 14 -
542.7 KB Views: 5




