 Facebook
Facebook Google
Google GitHub
GitHub Linkedin
Linkedin
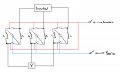
I want to make a switch box for a PMSM to able to reconfigure between series-parallel and star-delta of the stator windings. Still haven't decided if I want to be able to do all four configurations from the same device or two separate. I have made some suggestions for possible circuits, but I am not an expert so would love to get some feedback.
I am also struggling to decide what kind of "switches" will be most efficient. I want the device to be as small and efficient as possible, as the motor is used for a flying drone. I have looked into back-to-back MOSFETs and triacs, which one do you recommend? Or other suggestions?
Controlling the switching circuit is also another challenge. Will is be possible to drive the control circuit and switches in the "switch-box" from the power supply to the motor? (Which is a 44 V battery)
Would appreciate all kind of help, circuit diagrams, suggestions for switches and control strategy! I did some simulations and the motor draws at most 150 A in the delta-parallel connection.
Thanks!
I am also struggling to decide what kind of "switches" will be most efficient. I want the device to be as small and efficient as possible, as the motor is used for a flying drone. I have looked into back-to-back MOSFETs and triacs, which one do you recommend? Or other suggestions?
Controlling the switching circuit is also another challenge. Will is be possible to drive the control circuit and switches in the "switch-box" from the power supply to the motor? (Which is a 44 V battery)
Would appreciate all kind of help, circuit diagrams, suggestions for switches and control strategy! I did some simulations and the motor draws at most 150 A in the delta-parallel connection.
Thanks!
Attachments
-
 209.4 KB Views: 10
209.4 KB Views: 10 -
 365.8 KB Views: 10
365.8 KB Views: 10
")





