Facebook
Facebook Google
Google GitHub
GitHub Linkedin
Linkedin
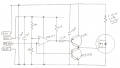
OK, so just suppose that the motor has 100A current flow (and nothing to sustain it), it has an inductance of 10H (I'm probably quite a bit low there) and your six 2uF caps in parallel with a super-duty diode to use to charge the caps with, then after about 20mS, you'd have ~91kv on the caps.I just bought 6 of these
1000v ; 2uf ; 400V/uSec ; 800A-peak ; 22A-ripple ; 7mΩ ESR
Oops, they're only rated for 1kv.
I see smoke and flames in your future.