or a microcontroller/transistor/mosfet (pwm)..
or an off the shelf DC SCR/PWM motor controller..
obviously all DC motors are not the same..
A proper/detailed question would include specifications on this DC motor.
or a microcontroller/transistor/mosfet (pwm)..
or an off the shelf DC SCR/PWM motor controller..
obviously all DC motors are not the same..
A proper/detailed question would include specifications on this DC motor.
or a microcontroller/transistor/mosfet (pwm)..
or an off the shelf DC SCR/PWM motor controller..
obviously all DC motors are not the same..
A proper/detailed question would include specifications on this DC motor.
thank to you answer..i will question any more..
used motor DC series....when speed motor dc low, whather torque of motor dc be decrease?? how mien speed is low we obtained torque advance ?
DC motor Torque curve is generally fairly flat, starting at maximum at zero rpm dropping when maximum rpm limit is reached.
SCR bridge is usually the cheapest method, followed by the more favorable PWM.
More is needed on your application.
Max.
DC motor Torque curve is generally fairly flat, starting at maximum at zero rpm dropping when maximum rpm limit is reached.
SCR bridge is usually the cheapest method, followed by the more favorable PWM.
More is needed on your application.
Max.
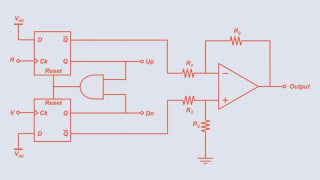
Your IMG shows a PID loop via encoder, as already mentioned this is suitable for precise positioning, if you just want constant velocity, the tach method can be used, usually tach/velocity loops can control to within 1%.
Either methods can be from self programmed Picmicro or other µp methods etc to off the shelf industrial controllers.
You need to specify your exact intentions, and any preferred or capable methods.
Max.
Your IMG shows a PID loop via encoder, as already mentioned this is suitable for precise positioning, if you just want constant velocity, the tach method can be used, usually tach/velocity loops can control to within 1%.
Either methods can be from self programmed Picmicro or other µp methods etc to off the shelf industrial controllers.
You need to specify your exact intentions, and any preferred or capable methods.
Max.
 Facebook
Facebook Google
Google GitHub
GitHub Linkedin
Linkedin