Facebook
Facebook Google
Google GitHub
GitHub Linkedin
Linkedin
Probably I was not sufficiently clear. I apologize if I was importunate when I started talking about the PID_v1 library.
I tried to use this library, but I have some questions, if you can, please have a look at them:
1. It is correct to call myPID.Compute() and myPID.SetTunings() in the ISR (zero() function) ?
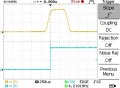
2. I see that when the output signal (pin 7) is going from 0V to 5V, appears a delay of about (1mS) measured on the scope. Is this delay considered normal ?
3. Is the code implemented correctly ? Please have a look at information on reply #100.
I tried to use this library, but I have some questions, if you can, please have a look at them:
1. It is correct to call myPID.Compute() and myPID.SetTunings() in the ISR (zero() function) ?
2. I see that when the output signal (pin 7) is going from 0V to 5V, appears a delay of about (1mS) measured on the scope. Is this delay considered normal ?
3. Is the code implemented correctly ? Please have a look at information on reply #100.