Facebook
Facebook Google
Google GitHub
GitHub Linkedin
Linkedin
Hi everyone,
I have built a controller for the following system and the gain margin comes to infinity. And the next question is whether can we design a digital compensator that would achieve a steady state error to be less 1% due to a step reference of 1 micrometer. I'm not sure about this as i get infinite gain margin and 0 steady steady state error already without a compensator.
A typical hard disk drive actuator can be modelled quite accurately as a double integrator:
G(s)=Y(s)/U(s)=6×10^7/^2
where y is the displacement of the read/write head in micrometre and u is the actuator input in volts. The sampling used in a typical hard disk drive servo system is 10 kHz. It is required to design an appropriate controller so the resulting closed-loop system has an overshoot less than 25% and a settling time less than 8 milliseconds as the response to a step reference of 1 micrometer.
1)Design a digital PD, PI, or PID controller to meet the above design specifications using the emulation based method. Show all the detailed design procedure and the results of your simulations using MATLAB and Simulink.
2)Can you design a digital lead compensator that would achieve the above design specifications?
3) If your answer is yes, please give your solutions together with all detailed derivations and simulation results. If your answer is no, then, give your reasons together with detailed justification. Use MATLAB and SIMULINK wherever necessary.
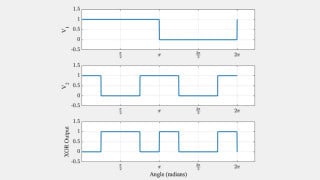
this is what i got without a compensator
View attachment 195363
View attachment 195364
if someone can provide me some guidance on Q2 and Q3 it would be much appreciated")
I have built a controller for the following system and the gain margin comes to infinity. And the next question is whether can we design a digital compensator that would achieve a steady state error to be less 1% due to a step reference of 1 micrometer. I'm not sure about this as i get infinite gain margin and 0 steady steady state error already without a compensator.
A typical hard disk drive actuator can be modelled quite accurately as a double integrator:
G(s)=Y(s)/U(s)=6×10^7/^2
where y is the displacement of the read/write head in micrometre and u is the actuator input in volts. The sampling used in a typical hard disk drive servo system is 10 kHz. It is required to design an appropriate controller so the resulting closed-loop system has an overshoot less than 25% and a settling time less than 8 milliseconds as the response to a step reference of 1 micrometer.
1)Design a digital PD, PI, or PID controller to meet the above design specifications using the emulation based method. Show all the detailed design procedure and the results of your simulations using MATLAB and Simulink.
2)Can you design a digital lead compensator that would achieve the above design specifications?
3) If your answer is yes, please give your solutions together with all detailed derivations and simulation results. If your answer is no, then, give your reasons together with detailed justification. Use MATLAB and SIMULINK wherever necessary.
this is what i got without a compensator
View attachment 195363
View attachment 195364
if someone can provide me some guidance on Q2 and Q3 it would be much appreciated
Last edited: