Facebook
Facebook Google
Google GitHub
GitHub Linkedin
Linkedin
As you can see my question is very naive that means I do not understand 3d mathematics. So I am seeking for help here.
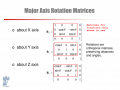
Books are making rotation about x-axis angle with z-axis that is something I do not understand really. Should not rotation about x-axis in 3d make angle with x itself?
Books are making rotation about x-axis angle with z-axis that is something I do not understand really. Should not rotation about x-axis in 3d make angle with x itself?