Facebook
Facebook Google
Google GitHub
GitHub Linkedin
Linkedin
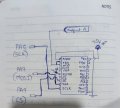
I have been studying the datasheet for the MAX5250BCPP+ DAC converter. I am trying to program it using my STM32F410RB. So, I was looking at the Serial-Interface Programming commands table and couldn't quite figure out how I should be sending data for getting the desired output. I have attached a screenshot of the table as well.
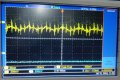
What I have been doing until now is that I setup the SPI communication between my STM32 and MAX5250. For the data, I prepared 10 samples of a sine wave digital input (I ultimately want to create a sine wave) for testing it out. This is what it looks like: 0b0011XXXXXXXXXX00. I chose 0b0011 as the address and control bits, to write to the DAC register A. I probed the output to check but I am getting nothing but noise.
These are the doubts I have:
1. How is the data flowing in this IC? Where does it enter, where does it go next, and so on?
2. What is the difference between a shift register and an output register?
(I am a newbie into this, and I'm left perplexed)
What I have been doing until now is that I setup the SPI communication between my STM32 and MAX5250. For the data, I prepared 10 samples of a sine wave digital input (I ultimately want to create a sine wave) for testing it out. This is what it looks like: 0b0011XXXXXXXXXX00. I chose 0b0011 as the address and control bits, to write to the DAC register A. I probed the output to check but I am getting nothing but noise.
These are the doubts I have:
1. How is the data flowing in this IC? Where does it enter, where does it go next, and so on?
2. What is the difference between a shift register and an output register?
(I am a newbie into this, and I'm left perplexed)
Attachments
-
 187.6 KB Views: 4
187.6 KB Views: 4