 Facebook
Facebook Google
Google GitHub
GitHub Linkedin
Linkedin
Hello everyone
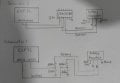
I tried to connect a rotary encoder with ESP32. However I can't to connect the Esp32 inputs to A and B encoder outputs because I have to polarized the encoder to minimum to 5 volts and the maximum voltage value for each ESP GPIO port is 3.3 volts. I used a tension divider on 25 and 26 ESP pins. Also I used the YES gate CD4050 for level the voltaje value without success in two cases.
Anyone can give me an idea to instrument the encoder outputs.
Thanks.
I tried to connect a rotary encoder with ESP32. However I can't to connect the Esp32 inputs to A and B encoder outputs because I have to polarized the encoder to minimum to 5 volts and the maximum voltage value for each ESP GPIO port is 3.3 volts. I used a tension divider on 25 and 26 ESP pins. Also I used the YES gate CD4050 for level the voltaje value without success in two cases.
Anyone can give me an idea to instrument the encoder outputs.
Thanks.





")




