Facebook
Facebook Google
Google GitHub
GitHub Linkedin
Linkedin
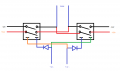
I have an old autopilot control head that simply outputs a 12v supply to a motor and reverses the polarity to change the direction of the motor to steer in the opposite direction. I am thinking of changing the motor to a linear ram that works the same way by reversing the polarity to push or pull. I suspect that the old autopilot control head cannot cope with the higher amp loads of the linear ram and so I need to find some way to switch the linear rams direction using the reversing polarity via relays (and probably diodes I am guessing). At the moment I just cant get my head around how to achieve this. Could anyone point me in the right direction (no autopilot pun intended)?
Autopilot controlled by reversing polarity via relays help needed
- Thread starter Vonasi
- Start date