Facebook
Facebook Google
Google GitHub
GitHub Linkedin
Linkedin
Dear helpers,
This is one of the last units of my part-time engineering course, hope to conclude it well with your kind help.
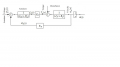
Currently, I have a digital control scenario question of a cascaded control of a position/velocity of a dc motor. I'm trying to tackle questions one by one and advise me if I'm in the right way. Attached in fig1 the coursework question, fig2 the tentative solution block diagram of B3 a).
For GP1 and GP2,
For GP2=1/s
For GP1, I did this derivation illustrated on fig3 referred to block diagram fig 2, kindly advice
GP2=0.01/(5.00625*10^-3s^2+0.060075s+0.100125)
Thank you
This is one of the last units of my part-time engineering course, hope to conclude it well with your kind help.
Currently, I have a digital control scenario question of a cascaded control of a position/velocity of a dc motor. I'm trying to tackle questions one by one and advise me if I'm in the right way. Attached in fig1 the coursework question, fig2 the tentative solution block diagram of B3 a).
For GP1 and GP2,
For GP2=1/s
For GP1, I did this derivation illustrated on fig3 referred to block diagram fig 2, kindly advice
GP2=0.01/(5.00625*10^-3s^2+0.060075s+0.100125)
Thank you
Attachments
-
 56.5 KB Views: 17
56.5 KB Views: 17 -
 46.4 KB Views: 18
46.4 KB Views: 18 -
 15.9 KB Views: 16
15.9 KB Views: 16
") More than likely they are made up constants just for the exercise (note the extreme precision of the friction and inductance values which would probably be impossible to measure that accurately).
More than likely they are made up constants just for the exercise (note the extreme precision of the friction and inductance values which would probably be impossible to measure that accurately).