I'm reviewing the AAC book for any sections on PWM, and can't find anything. Anyone else see something I'm missing?
Attachments
-
23.2 KB Views: 115
Last edited:
 Since Dave has been scarce for the last month or so I'll ask the mods (and anyone else that is interested) to proof it. I'll write it on this thread, I figure three posts (which I'll reserve) will do it.
Since Dave has been scarce for the last month or so I'll ask the mods (and anyone else that is interested) to proof it. I'll write it on this thread, I figure three posts (which I'll reserve) will do it.

You might wish to de-emphasize the "extremely easy" part; as it may not seem that easy to the reader. A link reference to low-pass filters/integrators would be good; maybe something like this: http://www.allaboutcircuits.com/vol_1/chpt_16/4.htmlStatus: Ready to Proof Read.
Pulse Width Modulation
Pulse Width Modulation (PWM) uses digital signals to control power applications, as well as being extremely easy to convert back to analog with a minimum of hardware.
Might want to qualify that as "linear" power supplies...Analog systems, such as power supplies,
... qualify with : as Power(Watts) = Current(Amps)Squared times Resistance(Ohms)... tend to generate a lot of heat since they are basically variable resistors carrying a lot of current.
...and the transition times are kept as brief as possible.Digital systems don't generally generate as much heat. Almost all the heat generated by a switching device is during the transition, while the device is neither on nor off, but in between.
You might want to restate the formula in it's typical form with explaining beside it, like:This is because power follows the following forumula:
P (Watts) = E I (Voltage X Current)
If either voltage or current is near zero then power will be near zero. PWM takes full advantage of this fact.
Ahhh, this isn't quite the case. Take a look at the datasheet of a Microchip PIC that has a capture/compare/PWM (CCP) module, such as a PIC12F683, or better yet look at this Application Note:PWM still maintains many of the characteristics of analog, in that there aren't any direct numbers associated with the digital signal. It is not generally meant to capture data.
Equate the ON time to "duty cycle percentage"One of the parameters of any square wave is duty cycle. Most square waves are 50%, this is the norm when discussing them, but they don't have to be symmetrical. The ON time can be varied completely between signal being off to being fully on, 0% to 100%, and all ranges between.
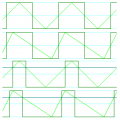
Somewhere around here, you should touch on PRF vs PRT and their 1/= relationship.Shown below are examples of a 10%, 50%, and 90% duty cycle. While the frequency is the same for each, this is not a requirement.

While LEDs are a workable example, an electric motor might be even better; as using PWM is more effective at controlling motor speed at low RPM than linear means.The reason PWM is popular is simple, many loads, such as resistors, integrate the power into a number matching the percentage. Conversion into an analog value is automatic. LEDs are very nonlinear in their response to current, give an LED half its rated current you you still get more than half the light the LED can produce. With PWM the light level produced by the LED is very linear.
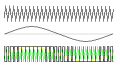
You might want to reference Rod Elliot's page here: http://sound.westhost.com/articles/pwm.htmPWM can be produced by using a sawtooth waveform and a comparator. As shown below the sawtooth (or triangle wave) need not be symmetrical, but linearity of the waveform is important. The frequency of the sawtooth waveform is the sampling rate for the signal.

Because there isn't any computation involved, PWM is fast. The limiting factor is the comparator's frequency response. In many cases this isn't an issue since many of the uses are fairly low speed.
Uses for PWM vary widely. It is the heart of Class D audio amplifiers, by increasing the voltages you increase the maximum output, and by selecting a frequency beyond human hearing (typically 24Khz) PWM can be used. The speakers do not respond to the high frequency, but duplicates the low frequency, which is the audio signal. Higher sampling rates can be used for even better fidelity.

Might want to change "extremely" to "very", or rephrase to something like "Motors as a class generally require high current to operate" - "extreme" is extremely overused nowadays by advertising types....Another popular application is motor speed control. Motors as a class require extremely high currents to operate. Being able to vary their speed with PWM increases the efficiency of the total system.
This is not correct. It doesn't "boost" the voltage, or "effective voltage" at all.PWM is often used in conjunction with an H-Bridge. This configuration is so named because it resembles the letter H, and boosts the effective voltage of the power supply to double what it's actual rating is.
PWM with inductors is basically how most of them work!In the case of inductive loads, such as motors, diodes are used to suppress inductive spikes, which may damage the transistors.

Switching Mode Power Supplies (SMPS) can also use PWM, although other methods also exist.
There are some switching supplies that exceed 97% efficiency.Adding topologies that use the stored power in both inductors and capacitors after the main switching components can boost the efficiencies for these devices to be quite high, approaching 90% in some cases. Below is an example of such a configuration.

Huh? You lost me there. If it is something that it needs added then I need to do some research. Hint please?Somewhere around here, you should touch on PRF vs PRT and their 1/= relationship.
as computation will come into play.Because there isn't any computation involved, PWM is fast. The limiting factor is the comparator's frequency response. In many cases this isn't an issue since many of the uses are fairly low speed
thusly:While LEDs are a workable example, an electric motor might be even better; as using PWM is more effective at controlling motor speed at low RPM than linear means.
Do you still think I need to change the paragraph about the LEDs?Another popular application is motor speed control. Motors as a class require very high currents to operate. Being able to vary their speed with PWM increases the efficiency of the total system. PWM is more effective at controlling motor speeds at low RPM than linear methods.
Perhaps it is an idea to put the "effective" value in the drawing as a dotted line.Shown below are examples of a 10%, 50%, and 90% duty cycle. While the frequency is the same for each, this is not a requirement.
The reason PWM is popular is simple. Many loads, such as resistors, integrate the power into a number matching the percentage. Conversion into an analog value is automatic. LEDs are very nonlinear in their response to current, give an LED half its rated current you you still get more than half the light the LED can produce. With PWM the light level produced by the LED is very linear. Motors, which will be covered later, are also very responsive to PWM.
For class D amplifiers even higher frequencies are used.Uses for PWM vary widely. It is the heart of Class D audio amplifiers, by increasing the voltages you increase the maximum output, and by selecting a frequency beyond human hearing (typically 24Khz) PWM can be used. The speakers do not respond to the high frequency, but duplicates the low frequency, which is the audio signal. Higher sampling rates can be used for even better fidelity. 100Khz is not unheard of.
In the above paragraph, the sentence "Conversion into an analog value is automatic.", would it be clearer to say "Conversion back into its analog equivalent value is straightforward.".The word "automatic" infers little or no effort involved while the word "straightforward" conveys that such conversions, while feasible, entail some effort.The reason PWM is popular is simple. Many loads, such as resistors, integrate the power into a number matching the percentage. Conversion into an analog value is automatic. LEDs are very nonlinear in their response to current, give an LED half its rated current you you still get more than half the light the LED can produce. With PWM the light level produced by the LED is very linear. Motors, which will be covered later, are also very responsive to PWM.

by Jake Hertz

by Jeff Child

by Aaron Carman

by Jake Hertz