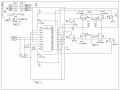
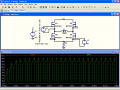
It's been a while since I have posted here, been busy with work and kids playing ball. I posted a while back about using the HIP4081A full bridge driver and I've finally started on it, but there's trouble. I started out driving the motor forward and everything seemed fine, except for I was only reading 8.5 volts across the motor at full speed. Then I went to reverse and it worked for a few seconds then something happened. Forward still worked but no reverse. It acted like it wanted to start in reverse and then nothing. Well I went back to see if forward was still working and it did for a few seconds then Q2 starts smoking, and now the HIP4081A is dead and Q4 is shorted all the way around. Q2 still reads open but I'm not sure about its operation. I didn't have a fuse on the control circuit but did have a 40 amp automotive circuit breaker in line with the + terminal of the battery but it never tripped. I don't know exactly how much current the motor is supposed to draw, it's a trolling motor. Anyway, I've posted a schematic of the bridge circuit and some data sheets. Could someone look over the schematic and let me know if you see any problems? I was using a 250Hz signal from a op-amp on the inputs at about 9 volts. Also, could someone shed some light on the bootstrap capacitor calculation. I used equation 4 example from the HIP app. notes (with my values) and came up with .124uF. I don't have any dead time added to the input circuit, that's the only thing I can think would be causing problems. I'm not sure what to look for as to what killed the HIP4081A though. Thanks in advance guys for the help.
Attachments
-
328.9 KB Views: 68
-
714.3 KB Views: 41
-
184.9 KB Views: 58
-
107.1 KB Views: 56