(mechanical question alert) This is sort of a continuation of my previous thread about theoretical 3 wheeled vehicles.
I've been giving some more thought to it, and mainly about mechanical solutions to the division of power between 2 wheels.
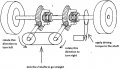
The ordinary (not LSD) differential of a car allows for one wheel of the car to spin faster & the other slower, with a constant power input. But, using a that same differential (or another type) is there a way to force unequal speed between the 2 wheels for a constant power input?
I'm pretty sure that if brakes were applied to one side, it would slow down on that side and speed up on the other side, which would accomplish the goal, but the vehicle would be working against itself for a period of time (inefficient). So what is the 'as close to lossless as possible' way to do it?
I considered placing a mechanical speed variator in parallel with the diferential, which would force unequal speed, but variators can o nly be adjusted while running. This would need to work from a stop.
Thanks for any ideas
I've been giving some more thought to it, and mainly about mechanical solutions to the division of power between 2 wheels.
The ordinary (not LSD) differential of a car allows for one wheel of the car to spin faster & the other slower, with a constant power input. But, using a that same differential (or another type) is there a way to force unequal speed between the 2 wheels for a constant power input?
I'm pretty sure that if brakes were applied to one side, it would slow down on that side and speed up on the other side, which would accomplish the goal, but the vehicle would be working against itself for a period of time (inefficient). So what is the 'as close to lossless as possible' way to do it?
I considered placing a mechanical speed variator in parallel with the diferential, which would force unequal speed, but variators can o nly be adjusted while running. This would need to work from a stop.
Thanks for any ideas